
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Un articolo per comprendere la differenza tra motori passo-passo e servomotori
I. Differenze tra motori passo-passo e servo e servomotori
Motore passo-passo: è il segnale dell'impulso elettrico nello spostamento angolare o nello spostamento della linea delle parti del motore passo-passo dell'elemento di controllo ad anello aperto. In poche parole, si basa sul segnale dell'impulso elettrico per controllare l'angolo e il numero di giri. Quindi fa affidamento solo sul segnale dell'impulso per determinare la quantità di rotazione. Poiché non è presente alcun sensore, l'angolo di arresto potrebbe deviare. Tuttavia, il segnale di impulso preciso riduce al minimo la deviazione.
Servomotore: fare affidamento sul circuito di servocontrollo per controllare la velocità del motore, attraverso il sensore per controllare la posizione di rotazione. Quindi il controllo della posizione è molto preciso. E anche la velocità di rotazione è variabile.
Servo (servo elettronico): il componente principale del servo è il servomotore. Contiene il circuito di controllo del servomotore + il set di riduttori. Oh sì, il servomotore non ha un riduttore. E il servo ha un riduttore.
Nel caso di un servo limite, si basa su un potenziometro sotto l'albero di uscita per determinare l'angolo di virata del braccio del timone. Il controllo del segnale servo è un segnale modulato in larghezza di impulso (PWM), dove un microcontrollore può facilmente generare questo segnale.
II. Principio base del motore passo-passo
Come funziona:
Normalmente il rotore di un motore è un magnete permanente e quando la corrente scorre attraverso gli avvolgimenti dello statore, gli avvolgimenti dello statore producono un campo magnetico vettoriale. Questo campo magnetico farà ruotare il rotore di un angolo, in modo che la direzione della coppia di campi magnetici del rotore sarà la stessa direzione del campo magnetico dello statore. Quando il campo magnetico vettoriale dello statore ruota di un angolo. Anche il rotore ruota di un angolo con questo campo magnetico. Per ogni impulso elettrico in ingresso, il motore ruota di un passo angolare in avanti. Il suo spostamento angolare in uscita è proporzionale al numero di impulsi in ingresso e la sua velocità di rotazione è proporzionale alla frequenza degli impulsi. Cambiando l'ordine in cui gli avvolgimenti vengono alimentati, il motore inverte. Pertanto, il numero e la frequenza degli impulsi e l'ordine di eccitazione degli avvolgimenti di ciascuna fase del motore possono essere controllati per controllare la rotazione del motore passo-passo.
Principio della generazione di calore:
Di solito si vedono tutti i tipi di motori, gli interni sono con nucleo in ferro e bobina di avvolgimento. La resistenza dell'avvolgimento, la potenza produrrà perdita, dimensione della perdita e resistenza e la corrente è proporzionale al quadrato, che viene spesso definita perdita di rame, se la corrente non è la corrente continua standard o un'onda sinusoidale, produrrà anche perdita armonica; il nucleo ha un effetto di corrente parassita di isteresi, nel campo magnetico alternato produrrà anche perdita, la dimensione del materiale, corrente, frequenza, tensione correlata, che si chiama perdita di ferro. La perdita di rame e di ferro si manifesterà sotto forma di generazione di calore, influenzando così l'efficienza del motore. I motori passo-passo generalmente perseguono la precisione di posizionamento e la coppia erogata, l'efficienza è relativamente bassa, la corrente è generalmente maggiore e le componenti armoniche sono elevate, la frequenza della corrente si alterna con la velocità e il cambiamento, quindi i motori passo-passo generalmente hanno una situazione di calore e la situazione è più grave del motore CA generale.
III. Costruzione del timone
Il servo è composto principalmente da un alloggiamento, un circuito stampato, un motore di azionamento, un riduttore e un elemento di rilevamento della posizione. Il suo principio di funzionamento è che il ricevitore invia un segnale al servo e l'IC sul circuito guida il motore senza nucleo per iniziare a ruotare e la potenza viene trasmessa al braccio oscillante attraverso il riduttore e, allo stesso tempo, il rilevatore di posizione invia un segnale per determinare se è arrivato o meno al posizionamento. Il rilevatore di posizione è in realtà un resistore variabile. Quando il servo ruota, il valore del resistore cambierà di conseguenza e l'angolo di rotazione può essere conosciuto rilevando il valore del resistore. Il servomotore generale è un sottile filo di rame avvolto attorno a un rotore a tre poli, quando la corrente scorre attraverso la bobina genera un campo magnetico e la periferia del magnete del rotore produce repulsione, che a sua volta genera la forza di rotazione. Secondo la fisica, il momento d'inerzia di un oggetto è direttamente proporzionale alla sua massa, quindi maggiore è la massa dell'oggetto da ruotare, maggiore è la forza richiesta. Per ottenere un'elevata velocità di rotazione e un basso consumo energetico, il servo è costituito da sottili fili di rame intrecciati in un cilindro cavo molto sottile, formando un rotore cavo molto leggero senza poli, e i magneti sono posizionati all'interno del cilindro, che è il motore a tazza cava.
Per adattarsi ai diversi ambienti di lavoro, sono disponibili servi con design impermeabile e antipolvere; e in risposta ai diversi requisiti di carico, ci sono ingranaggi in plastica e metallo per i servi, e gli ingranaggi in metallo per i servo sono generalmente ad alta coppia e alta velocità, con il vantaggio che gli ingranaggi non si scheggeranno a causa di carichi eccessivi. I servi di qualità superiore saranno dotati di cuscinetti a sfera per rendere la rotazione più veloce e precisa. C'è differenza tra un cuscinetto a sfere e due cuscinetti a sfere, ovviamente i due cuscinetti a sfere sono migliori. I nuovi servi FET utilizzano principalmente FET (transistor ad effetto di campo), che ha il vantaggio di una bassa resistenza interna e quindi di una minore perdita di corrente rispetto ai normali transistor.
IV. Principio di funzionamento del servo
Dall'onda pwm nel circuito interno per generare una tensione di polarizzazione, il generatore del contattore attraverso il riduttore fa muovere il potenziometro, in modo che quando la differenza di tensione è zero, il motore si ferma, in modo da ottenere l'effetto del servo.
I protocolli per i servo PWM sono tutti uguali, ma gli ultimi servo apparsi potrebbero essere diversi.
Il protocollo è generalmente: larghezza di alto livello in 0,5 ms ~ 2,5 ms per controllare il servo per girare attraverso diversi angoli.
V. Come funzionano i servomotori
La figura seguente mostra un circuito di controllo del servomotore realizzato con un amplificatore operazionale di potenza LM675 e il motore è un servomotore CC. Come si può vedere dalla figura, l'amplificatore operazionale di potenza LM675 è alimentato da 15 V e la tensione di 15 V viene aggiunta all'ingresso in fase dell'amplificatore operazionale LM675 tramite RP 1 e la tensione di uscita dell'LM675 viene aggiunta all'ingresso del servomotore. Il motore è dotato di un generatore di segnale di misurazione della velocità per il rilevamento in tempo reale della velocità del motore. In effetti, il generatore del segnale di velocità è una sorta di generatore e la sua tensione di uscita è proporzionale alla velocità di rotazione. L'uscita di tensione dal generatore del segnale di misurazione della velocità G viene ricondotta all'ingresso invertente dell'amplificatore operazionale come segnale di errore di velocità dopo un circuito divisore di tensione. Il valore di tensione impostato dal potenziometro del comando di velocità RP1 viene aggiunto all'ingresso in fase dell'amplificatore operazionale dopo la divisione della tensione per R1.R2, che è equivalente alla tensione di riferimento.
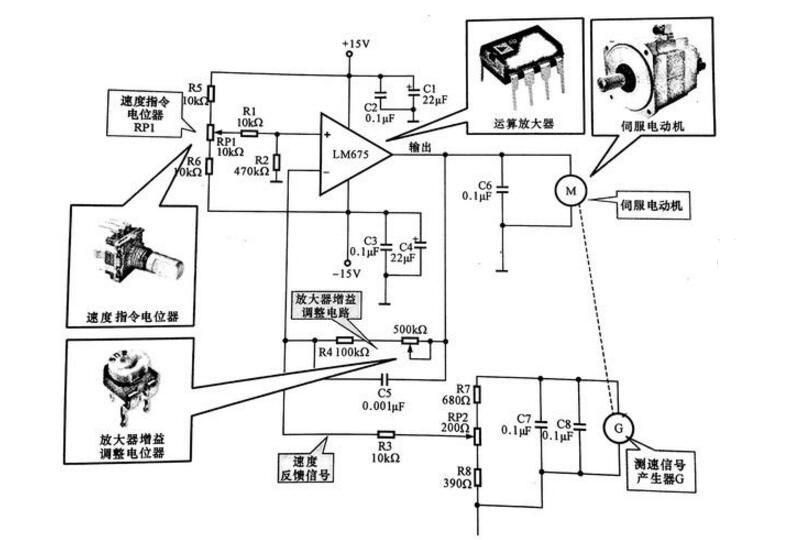
Schema di controllo del servomotore
Servomotore: indicato con la lettera M per servomotore, è la fonte di energia per il sistema di azionamento. Amplificatore operazionale: indicato con il nome del circuito, ovvero LM675, è un amplificatore nel circuito di servocontrollo che fornisce la corrente di azionamento per il servomotore.
Potenziometro del comando di velocità RP1: imposta la tensione di riferimento dell'amplificatore operazionale nel circuito, ovvero l'impostazione della velocità. Potenziometro di regolazione del guadagno dell'amplificatore RP2: utilizzato nel circuito per regolare con precisione rispettivamente il guadagno dell'amplificatore e la dimensione del segnale di feedback della velocità.
Quando cambia il carico del motore, cambia anche la tensione restituita all'ingresso invertito dell'amplificatore operazionale, cioè quando il carico del motore aumenta, la velocità diminuisce e anche la tensione di uscita del generatore di segnale di velocità diminuisce, in modo che la tensione all'ingresso invertito dell'amplificatore operazionale diminuisce e la differenza tra questa tensione e la tensione di riferimento aumenta e la tensione di uscita dell'amplificatore operazionale aumenta. Al contrario, quando il carico diminuisce e la velocità del motore aumenta, la tensione di uscita del generatore del segnale di misurazione della velocità aumenta, la tensione di retroazione aggiunta all'ingresso invertito dell'amplificatore operazionale aumenta, la differenza tra questa tensione e la tensione di riferimento diminuisce, la tensione di uscita dell'amplificatore operazionale diminuisce e la velocità del motore diminuisce di conseguenza, in modo che la velocità di rotazione possa essere stabilizzata automaticamente al valore impostato.


